Pelajaran ini bermula dengan dua huraian matematik yang setara bagi pengukuran:
Pengukuran umum boleh dihuraikan oleh koleksi matriks, satu bagi setiap hasil pengukuran, dengan cara yang mengeneralisasikan huraian pengukuran unjuran.
Pengukuran umum boleh dihuraikan sebagai saluran yang outputnya sentiasa merupakan keadaan klasik (diwakili oleh matriks ketumpatan pepenjuru).
Kita akan menumpukan perhatian pada pengukuran yang mempunyai bilangan hasil yang terhingga.
Walaupun pengukuran dengan hasil tidak terhingga boleh ditakrifkan, ia jarang ditemui dalam konteks pengkomputeran dan pemprosesan maklumat, dan ia juga memerlukan matematik tambahan (iaitu teori ukur) untuk diformalisasikan dengan betul.
Fokus awal kita adalah pada pengukuran yang dikenali sebagai pengukuran merosakkan, di mana output pengukuran hanyalah hasil pengukuran klasik semata-mata — tanpa spesifikasi keadaan kuantum pasca-pengukuran sistem yang diukur.
Secara intuitif, kita boleh bayangkan bahawa pengukuran sedemikian memusnahkan sistem kuantum itu sendiri, atau bahawa sistem itu segera dibuang setelah pengukuran dibuat.
Kemudian dalam pelajaran ini kita akan meluaskan pandangan dan mempertimbangkan pengukuran tidak merosakkan, di mana terdapat kedua-dua hasil pengukuran klasik dan keadaan kuantum pasca-pengukuran sistem yang diukur.
Andaikan X ialah sistem yang hendak diukur, dan andaikan untuk kesederhanaan bahawa set keadaan klasik X ialah {0,…,n−1} bagi suatu integer positif n, supaya matriks ketumpatan yang mewakili keadaan kuantum X ialah matriks n×n.
Sebenarnya kita tidak banyak perlu merujuk kepada keadaan klasik X, tetapi akan lebih mudah untuk merujuk kepada n, iaitu bilangan keadaan klasik X.
Kita juga akan menganggap hasil-hasil pengukuran yang mungkin ialah integer 0,…,m−1 bagi suatu integer positif m.
Perlu diingat bahawa kita hanya menggunakan nama-nama ini untuk memudahkan perkara; adalah mudah untuk mengeneralisasikan semua yang berikut kepada set terhingga keadaan klasik dan hasil pengukuran lain, dengan menamakan semula seperti yang diingini.
Ingat bahawa pengukuran unjuran dihuraikan oleh koleksi matriks unjuran yang berjumlah kepada matriks identiti.
Dalam simbol,
{Π0,…,Πm−1}
menghuraikan pengukuran unjuran X jika setiap Πa ialah matriks unjuran n×n dan syarat berikut dipenuhi.
Π0+⋯+Πm−1=IX
Apabila pengukuran sedemikian dilakukan pada sistem X semasa ia berada dalam keadaan yang dihuraikan oleh suatu vektor keadaan kuantum ∣ψ⟩, setiap hasil a diperoleh dengan kebarangkalian sama dengan ∥Πa∣ψ⟩∥2.
Kita juga mempunyai bahawa keadaan pasca-pengukuran X diperoleh dengan menormalkan vektor Πa∣ψ⟩, tetapi kita mengabaikan keadaan pasca-pengukuran buat masa ini.
Jika keadaan X dihuraikan oleh matriks ketumpatan ρ dan bukannya vektor keadaan kuantum ∣ψ⟩, maka kita boleh secara alternatif menyatakan kebarangkalian untuk memperoleh hasil a sebagai Tr(Πaρ).
Jika ρ=∣ψ⟩⟨ψ∣ ialah keadaan tulen, maka kedua-dua ungkapan adalah sama:
Di sini kita menggunakan sifat siklik surih untuk persamaan kedua, dan untuk persamaan ketiga kita menggunakan fakta bahawa setiap Πa ialah matriks unjuran, dan oleh itu memenuhi Πa2=Πa.
Secara umum, jika ρ ialah kombinasi cembung
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
bagi keadaan-keadaan tulen, maka ungkapan Tr(Πaρ) berpadanan dengan kebarangkalian purata untuk hasil a, disebabkan fakta bahawa ungkapan ini adalah linear dalam ρ.
Huraian matematik bagi pengukuran umum diperoleh dengan melonggarkan takrifan pengukuran unjuran.
Secara khusus, kita membenarkan matriks dalam koleksi yang menghuraikan pengukuran menjadi matriks separuh-tentu positif yang sewenang-wenangnya dan bukannya unjuran.
(Unjuran sentiasa separuh-tentu positif; ia boleh ditakrifkan secara alternatif sebagai matriks separuh-tentu positif yang nilai eigennya semuanya sama ada 0 atau 1.)
Khususnya, pengukuran umum bagi sistem X yang mempunyai hasil 0,…,m−1 ditentukan oleh koleksi matriks separuh-tentu positif {P0,…,Pm−1} yang baris dan lajurnya sepadan dengan keadaan klasik X dan memenuhi syarat
P0+⋯+Pm−1=IX.
Jika sistem X diukur semasa ia berada dalam keadaan yang dihuraikan oleh matriks ketumpatan ρ, maka setiap hasil
a∈{0,…,m−1} muncul dengan kebarangkalian Tr(Paρ).
Seperti yang semestinya kita tuntut, vektor kebarangkalian hasil
(Tr(P0ρ),…,Tr(Pm−1ρ))
bagi pengukuran umum sentiasa membentuk vektor kebarangkalian, bagi mana-mana pilihan matriks ketumpatan ρ.
Dua pemerhatian berikut menetapkan bahawa ini memang kes demikian.
Setiap nilai Tr(Paρ) mestilah bukan negatif, disebabkan fakta bahawa surih darab mana-mana dua matriks separuh-tentu positif sentiasa bukan negatif:
Q,R≥0⇒Tr(QR)≥0.
Satu cara untuk membuktikan fakta ini ialah menggunakan penguraian spektrum Q dan R bersama-sama dengan sifat siklik surih untuk menyatakan surih darab QR sebagai jumlah nombor nyata bukan negatif, yang oleh itu mestilah bukan negatif.
Syarat P0+⋯+Pm−1=IX bersama-sama dengan lineariti surih memastikan bahawa kebarangkalian-kebarangkalian berjumlah kepada 1.
Andaikan X ialah qubit, dan takrifkan dua matriks seperti berikut.
P0=(32313131)P1=(31−31−3132)
Kedua-duanya adalah matriks separuh-tentu positif: ia adalah Hermitian, dan dalam kedua-dua kes nilai eigen kebetulan ialah 1/2±5/6, yang kedua-duanya positif.
Kita juga mempunyai bahawa P0+P1=I, dan oleh itu {P0,P1} menghuraikan sebuah pengukuran.
Jika keadaan X dihuraikan oleh matriks ketumpatan ρ dan kita melakukan pengukuran ini, maka kebarangkalian mendapat hasil 0 ialah Tr(P0ρ) dan kebarangkalian mendapat hasil 1 ialah
Tr(P1ρ).
Sebagai contoh, jika ρ=∣+⟩⟨+∣ maka kebarangkalian bagi kedua-dua hasil 0 dan 1 adalah seperti berikut.
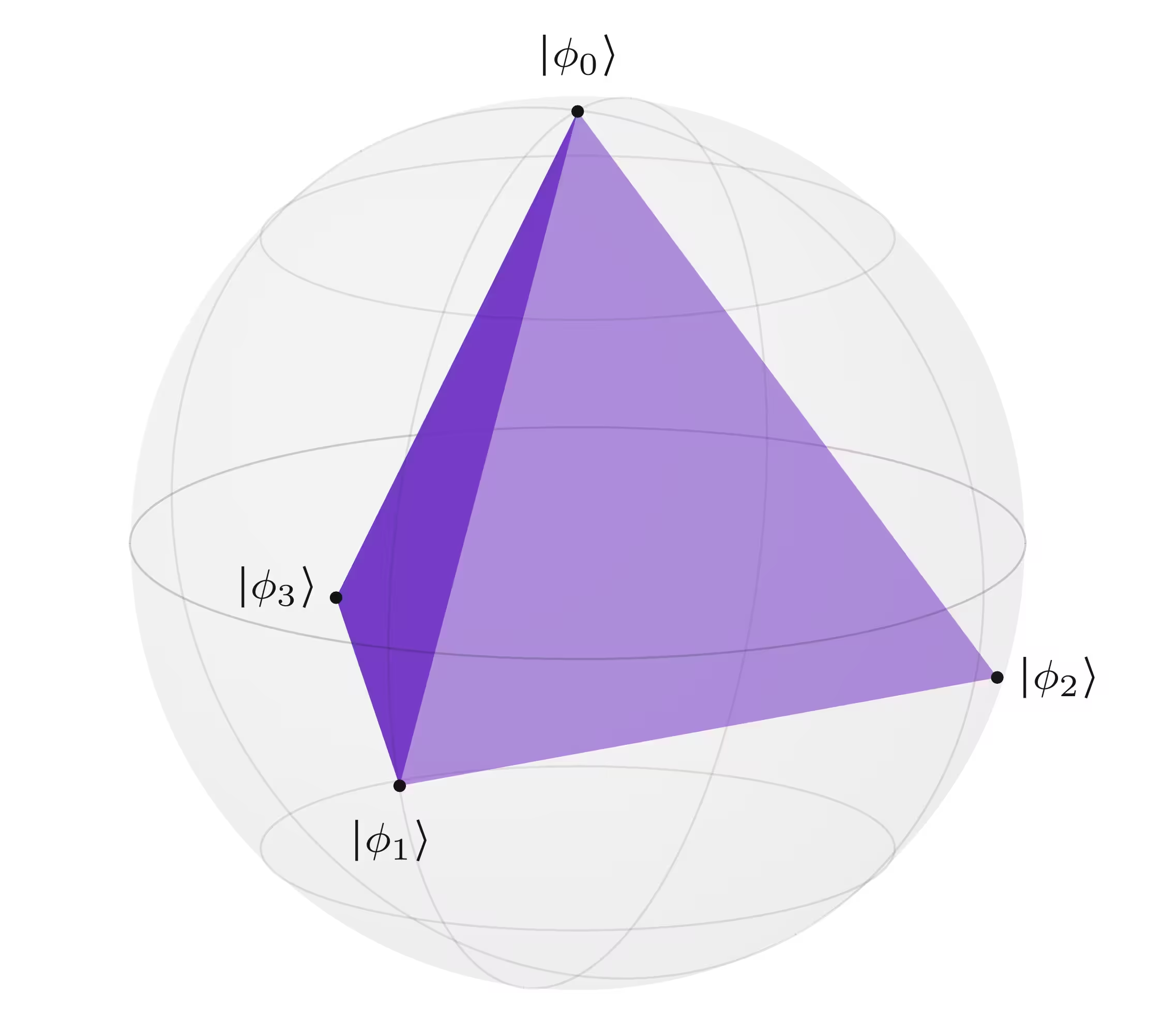
Keempat-empat keadaan ini kadang-kadang dikenali sebagai keadaan tetrahedron kerana ia adalah bucu-bucu sebuah tetrahedron sekata yang tertulis dalam sfera Bloch.
Koordinat Cartesian keempat-empat keadaan ini pada sfera Bloch ialah
Keempat-empat keadaan ini tersebar dengan sempurna di atas sfera Bloch, masing-masing sama jauh dari tiga yang lain dan dengan sudut antara mana-mana dua daripadanya sentiasa sama.
Sekarang mari kita takrifkan pengukuran {P0,P1,P2,P3} bagi qubit dengan menetapkan Pa seperti berikut bagi setiap a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
Kita boleh mengesahkan bahawa ini adalah pengukuran yang sah seperti berikut.
Setiap Pa jelas separuh-tentu positif, kerana ia adalah keadaan tulen dibahagi dengan satu per dua.
Yakni, setiap satunya ialah matriks Hermitian yang mempunyai satu nilai eigen sama dengan 1/2 dan semua nilai eigen lain sifar.
Jumlah matriks-matriks ini ialah matriks identiti: P0+P1+P2+P3=I.
Ungkapan matriks-matriks ini sebagai kombinasi linear matriks Pauli menjadikan ini mudah untuk disahkan.
Cara kedua untuk menerangkan pengukuran dalam istilah matematik ialah sebagai saluran.
Maklumat klasik boleh dilihat sebagai kes khas maklumat kuantum, setakat mana kita boleh mengenal pasti keadaan probabilistik dengan matriks ketumpatan pepenjuru.
Jadi, dalam istilah operasi, kita boleh memikirkan pengukuran sebagai saluran yang inputnya ialah matriks yang menerangkan keadaan sistem yang diukur dan outputnya ialah matriks ketumpatan pepenjuru yang menerangkan taburan hasil pengukuran yang terhasil.
Kita akan lihat tidak lama lagi bahawa sebarang saluran yang mempunyai sifat ini sentiasa boleh ditulis dalam bentuk kanonik yang mudah dan berkaitan terus dengan penerangan pengukuran sebagai koleksi matriks semidefinit positif.
Sebaliknya, diberi pengukuran umum sebagai koleksi matriks, sentiasa ada saluran sah yang mempunyai sifat output pepenjuru yang menerangkan pengukuran yang diberi seperti yang dicadangkan dalam perenggan sebelumnya.
Dengan menggabungkan pemerhatian-pemerhatian ini, kita dapati bahawa dua penerangan pengukuran umum adalah setara.
Sebelum meneruskan lebih jauh, mari kita lebih tepat mengenai pengukuran, bagaimana kita memandangnya sebagai saluran, dan andaian-andaian yang kita buat.
Seperti sebelumnya, kita andaikan X ialah sistem yang hendak diukur, dan kemungkinan hasil pengukuran ialah integer 0,…,m−1 untuk sesetengah integer positif m.
Kita biarkan Y menjadi sistem yang menyimpan hasil pengukuran, jadi set keadaan klasiknya ialah {0,…,m−1}, dan kita wakilkan pengukuran sebagai saluran bernama Φ dari X ke Y.
Andaian kita ialah Y bersifat klasik — bermakna tidak kira apa keadaan awal X, keadaan Y yang kita peroleh sentiasa diwakili oleh matriks ketumpatan pepenjuru.
Kita boleh nyatakan dalam istilah matematik bahawa output Φ sentiasa pepenjuru dengan cara berikut.
Mula-mula takrifkan saluran penyahfasa penuh Δm pada Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Saluran ini analog dengan saluran penyahfasa penuh qubit Δ dari pelajaran sebelumnya.
Sebagai pemetaan linear, ia menghapuskan semua entri luar pepenjuru matriks input dan membiarkan pepenjuru tidak berubah.
Kini, cara mudah untuk menyatakan bahawa matriks ketumpatan σ tertentu adalah pepenjuru ialah melalui persamaan
σ=Δm(σ).
Dengan kata lain, menghapuskan semua entri luar pepenjuru matriks ketumpatan tidak memberi kesan jika dan hanya jika entri luar pepenjuru tersebut sudah sifar dari awal.
Saluran Φ oleh itu memenuhi andaian kita — bahawa Y bersifat klasik — jika dan hanya jika
Φ(ρ)=Δm(Φ(ρ))
untuk setiap matriks ketumpatan ρ yang mewakili keadaan X.
Oleh itu, untuk matriks P0,…,Pm−1 yang sama ini, kita boleh nyatakan saluran Φ seperti berikut.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Ungkapan ini konsisten dengan penerangan kita tentang pengukuran umum dalam bentuk matriks, di mana kita lihat setiap hasil pengukuran muncul dengan kebarangkalian Tr(Paρ).
Sekarang mari kita perhatikan bahawa dua sifat yang diperlukan koleksi matriks {P0,…,Pm−1} untuk menerangkan pengukuran umum memang dipenuhi.
Sifat pertama ialah ia semua adalah matriks semidefinit positif.
Salah satu cara untuk melihat ini ialah dengan memerhatikan bahawa, untuk setiap vektor ∣ψ⟩ yang entrinya berpadanan dengan keadaan klasik X kita ada
Sekarang mari kita sahkan bahawa untuk sebarang koleksi {P0,…,Pm−1} matriks semidefinit positif yang memenuhi P0+⋯+Pm−1=IX, pemetaan yang ditakrifkan oleh
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
memang merupakan saluran sah dari X ke Y.
Salah satu cara untuk melakukan ini ialah dengan mengira perwakilan Choi bagi pemetaan ini.
Transpose setiap Pa diperkenalkan untuk kesamaan ketiga kerana
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Ini membolehkan ungkapan ∣b⟩⟨b∣ dan ∣c⟩⟨c∣ muncul, yang menjadi matriks identiti apabila dijumlahkan ke atas b dan c masing-masing.
Dengan andaian bahawa P0,…,Pm−1 adalah semidefinit positif, begitu juga P0T,…,Pm−1T.
Khususnya, mentranspos matriks Hermitian menghasilkan matriks Hermitian yang lain, dan nilai eigen sebarang matriks persegi dan transposenya sentiasa sama.
Oleh itu J(Φ) adalah semidefinit positif.
Mensurih keluar sistem output Y (iaitu sistem di sebelah kanan) menghasilkan
Andaikan kita mempunyai berbilang sistem yang bersama-sama berada dalam keadaan kuantum, dan pengukuran umum dilakukan pada salah satu sistem.
Ini menghasilkan salah satu hasil pengukuran, dipilih secara rawak mengikut kebarangkalian yang ditentukan oleh pengukuran dan keadaan sistem sebelum pengukuran.
Keadaan sistem yang tinggal kemudiannya, secara umum, bergantung pada hasil pengukuran yang diperoleh.
Mari kita kaji bagaimana ini berlaku untuk pasangan sistem (X,Z) apabila sistem X diukur.
(Kita namakan sistem di sebelah kanan Z kerana kita akan gunakan Y sebagai sistem yang mewakili output klasik pengukuran apabila kita melihatnya sebagai saluran.)
Kita kemudiannya boleh generalisasikan dengan mudah kepada situasi di mana urutan sistem diterbalikkan serta kepada tiga sistem atau lebih.
Andaikan keadaan (X,Z) sebelum pengukuran diterangkan oleh matriks ketumpatan ρ, yang boleh kita tulis seperti berikut.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
Dalam ungkapan ini kita andaikan keadaan klasik X ialah 0,…,n−1.
Kita andaikan pengukuran itu sendiri diterangkan oleh koleksi matriks
{P0,…,Pm−1}.
Pengukuran ini boleh diterangkan secara alternatif sebagai saluran Φ dari X ke Y, di mana Y ialah sistem baru yang mempunyai set keadaan klasik {0,…,m−1}.
Khususnya, tindakan saluran ini boleh dinyatakan seperti berikut.
Kita sedang mempertimbangkan pengukuran sistem X, jadi kebarangkalian dengan mana hasil pengukuran yang berbeza diperoleh hanya boleh bergantung pada ρX, keadaan terturun X.
Khususnya, kebarangkalian untuk setiap hasil a∈{0,…,m−1} muncul boleh dinyatakan dalam tiga cara yang setara.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
Ungkapan pertama secara semula jadi mewakili kebarangkalian untuk memperoleh hasil a berdasarkan apa yang kita sudah tahu tentang pengukuran sistem tunggal.
Untuk mendapatkan ungkapan kedua kita hanya menggunakan takrifan ρX=TrZ(ρ).
Untuk mendapatkan ungkapan ketiga memerlukan lebih banyak pemikiran — dan pelajar digalakkan untuk meyakinkan diri bahawa ia adalah benar.
Berikut adalah petunjuk: Kesetaraan antara ungkapan kedua dan ketiga dalam persamaan sebelumnya tidak bergantung pada ρ sebagai matriks ketumpatan atau pada setiap Pa sebagai semidefinit positif. Cuba buktikan ia terlebih dahulu untuk hasil darab tensor berbentuk ρ=M⊗N dan kemudian simpulkan ia mesti benar secara umum melalui kelinearan.
Walaupun kesetaraan ungkapan pertama dan ketiga dalam persamaan sebelumnya mungkin tidak segera jelas, ia masuk akal.
Bermula dari pengukuran pada X, kita secara efektif mentakrifkan pengukuran (X,Z), di mana kita hanya membuang Z dan mengukur X.
Seperti semua pengukuran, pengukuran baru ini boleh diterangkan oleh koleksi matriks, dan tidak hairanlah pengukuran ini diterangkan oleh koleksi
Jika kita ingin menentukan bukan sahaja kebarangkalian untuk hasil yang berbeza tetapi juga keadaan Z yang terhasil bersyarat pada setiap hasil pengukuran, kita boleh melihat kepada penerangan saluran bagi pengukuran tersebut.
Khususnya, mari kita kaji keadaan yang kita peroleh apabila kita menerapkan Φ pada X dan tidak melakukan apa-apa pada Z.
seperti yang kita lihat dalam pelajaran Matriks ketumpatan.
Untuk setiap hasil pengukuran a∈{0,…,m−1}, kita ada dengan kebarangkalian
p(a)=Tr((Pa⊗IZ)ρ)
bahawa Y berada dalam keadaan klasik ∣a⟩⟨a∣ dan Z berada dalam keadaan
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Iaitu, ini ialah matriks ketumpatan yang kita peroleh dengan menormalkan
TrX((Pa⊗IZ)ρ)
dengan membahaginya dengan surihnya.
(Secara formal, keadaan σa hanya ditakrifkan apabila kebarangkalian p(a) adalah bukan sifar;
apabila p(a)=0 keadaan ini tidak relevan, kerana ia merujuk kepada peristiwa diskret yang berlaku dengan kebarangkalian sifar.)
Secara semula jadi, kebarangkalian hasil pengukuran adalah konsisten dengan pemerhatian kita sebelum ini.
Ringkasnya, inilah yang berlaku apabila pengukuran {P0,…,Pm−1} dilakukan pada X apabila (X,Z) berada dalam keadaan ρ.
Setiap hasil a muncul dengan kebarangkalian p(a)=Tr((Pa⊗IZ)ρ).
Bersyarat pada memperoleh hasil a, keadaan Z kemudiannya diwakili oleh matriks ketumpatan σa yang ditunjukkan dalam persamaan (2), yang diperoleh dengan menormalkan TrX((Pa⊗IZ)ρ).
Kita boleh menyesuaikan penerangan ini kepada situasi lain, seperti apabila urutan sistem diterbalikkan atau apabila terdapat tiga sistem atau lebih.
Secara konseptual ia adalah mudah, walaupun boleh menjadi agak rumit untuk menulis formulanya.
Secara umum, jika kita mempunyai r sistem X1,…,Xr, keadaan sistem kompaun (X1,…,Xr) ialah ρ, dan pengukuran {P0,…,Pm−1} dilakukan pada Xk, perkara berikut berlaku.
Setiap hasil a muncul dengan kebarangkalian
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Bersyarat pada memperoleh hasil a, keadaan (X1,…,Xk−1,Xk+1,…,Xr) kemudiannya diwakili oleh matriks ketumpatan berikut.