Formula berbilang hasil darab (MPF)
Versi pakej
Kod pada halaman ini dibangunkan menggunakan keperluan berikut. Kami mengesyorkan menggunakan versi ini atau yang lebih baharu.
Formula berbilang hasil darab (MPF) boleh digunakan untuk mensimulasikan dinamik sistem kuantum dengan lebih tepat, dengan kos pelaksanaan Circuit yang bertambah. Ini adalah teknik pasca-pemprosesan yang mengurangkan ralat nilai jangkaan untuk keadaan yang berevolusi masa.
Pengkomputeran klasik digunakan untuk menyelesaikan sistem persamaan linear yang menyediakan pekali kepada gabungan berwajaran beberapa pelaksanaan Circuit. Menggunakan gabungan berwajaran ini boleh mengurangkan ralat yang berkaitan dengan mensimulasikan evolusi masa, diberikan pemilihan langkah Trotter yang baik. Alat MPF akan menerima pilihan data — termasuk bilangan langkah Trotter dan peringkat penghampiran Trotter — untuk menyediakan dan menyelesaikan (atau menganggarkan penyelesaian) sistem persamaan linear yang berkaitan, yang kemudiannya boleh anda gunakan untuk pasca-proses pengukuran nilai jangkaan bagi keadaan yang berevolusi masa.
Pasang pakej MPF
Terdapat dua cara untuk memasang pakej MPF: melalui PyPI dan membina dari sumber. Adalah disyorkan untuk memasang dalam persekitaran maya untuk memastikan pemisahan antara kebergantungan pakej.
Pasang dari PyPI
Cara paling mudah untuk memasang pakej qiskit-addon-mpf adalah melalui PyPI.
pip install qiskit-addon-mpf
Bina dari sumber
Pengguna yang ingin membangunkan dalam repositori atau yang ingin memasangnya secara manual boleh berbuat demikian dengan terlebih dahulu mengklon repositori:
git clone git@github.com:Qiskit/qiskit-addon-mpf.git
dan pasang pakej melalui pip. Repositori juga mengandungi beberapa kebergantungan pilihan yang membolehkan ciri-ciri tertentu.
Laraskan pilihan mengikut keperluan anda.
pip install tox notebook -e '.[notebook-dependencies,dev]'
Latar belakang teori
MPF boleh mengurangkan ralat penghampiran Trotter yang berkaitan dengan mensimulasikan dinamik sistem kuantum melalui gabungan berwajaran beberapa pelaksanaan Circuit. Jumlah berwajaran ini ditakrifkan sebagai:
di mana adalah pekali pemberat, adalah matriks ketumpatan yang bersesuaian dengan keadaan tulen yang diperoleh dengan mengevolusi keadaan awal melalui formula hasil darab yang menghampiri operator evolusi masa menggunakan langkah Trotter, dan mengindeks setiap formula hasil darab yang digunakan dalam jumlah.
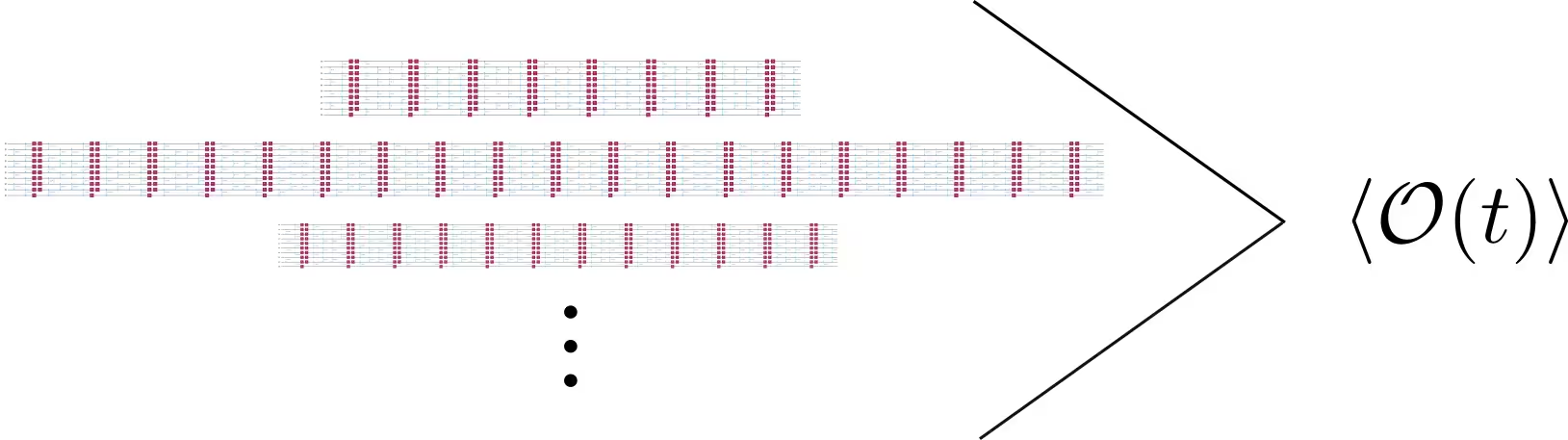
Secara amnya, walau bagaimanapun, matlamat mensimulasikan dinamik kuantum adalah untuk mengukur beberapa observable , yang merupakan fungsi masa. Apabila menggunakan MPF, beberapa Circuit — setiap satu menggunakan langkah Trotter — dilaksanakan untuk mendapatkan beberapa pengukuran observable sasaran . Pengukuran observable sasaran kemudiannya diperoleh dengan mengira:
Pada dasarnya, anda boleh mengurangkan jumlah ralat Trotter dengan menghampiri operator evolusi masa menggunakan beberapa formula hasil darab dengan bilangan langkah Trotter yang berubah-ubah dan bukannya satu formula hasil darab. Anda membina Circuit untuk setiap sebutan dalam jumlah berwajaran, yang mengevolusi sistem mengikut setiap bilangan langkah Trotter . Setiap Circuit kemudiannya dilaksanakan secara berasingan pada QPU untuk merekonstruksi keputusan dalam langkah pasca-pemprosesan. Kegunaan teknik ini boleh dilihat dari dua perspektif:
- Untuk bilangan langkah Trotter yang tetap yang anda laksanakan, anda boleh mendapatkan keputusan dengan ralat Trotter yang lebih kecil secara keseluruhan.
- Untuk bilangan langkah Trotter yang menghasilkan Circuit yang dalam, anda boleh menggunakan MPF untuk mencari beberapa Circuit dengan kedalaman yang lebih pendek untuk dijalankan, yang menghasilkan ralat penghampiran Trotter yang serupa.
Tentukan pekali MPF
Fungsi teras pakej qiskit-addon-mpf terletak pada penentuan pekali MPF (yang mungkin bergantung masa). Proses untuk mendapatkan setiap melibatkan penyelesaian sistem persamaan linear di mana adalah vektor pekali yang hendak ditentukan, adalah matriks yang bergantung kepada setiap dan formula hasil darab yang digunakan (iaitu, peringkat penghampiran dan bilangan langkah Trotter), dan adalah vektor kekangan. Sistem persamaan ini boleh diselesaikan sama ada secara tepat atau dengan model anggaran yang meminimumkan norma-1 pekali. Selain itu, pilihan untuk setiap adalah proses heuristik, tetapi boleh dibatasi oleh kekangan berikut:
- Nilai terbesar dibatasi oleh kedalaman Circuit tertinggi yang boleh dilaksanakan dengan boleh dipercayai
- terkecil perlu memenuhi kerana di situlah ralat Trotter berkelakuan paling baik
- Tiada satu pun pekali yang sepatutnya hampir kepada kerana ini bermakna mereka tidak menyumbang banyak kepada MPF
- Begitu juga, pekali yang berkaitan dengan nilai terbesar tidak sepatutnya mendominasi, kerana ini bermakna anda menggunakan satu formula hasil darab
- Akhir sekali, norma pekali yang diperoleh sepatutnya kecil, kerana ini menunjukkan MPF yang terkondisi dengan baik 1
Langkah seterusnya
- Baca halaman tentang bermula dengan MPF.
Rujukan
- A. Carrera Vazquez, D. J. Egger, D. Ochsner, and S. Wörner, "Well-conditioned multi-product formulas for hardware-friendly Hamiltonian simulation", Quantum 7, 1067 (2023).
- S. Zhuk, N. Robertson, and S. Bravyi, "Trotter error bounds and dynamic multi-product formulas for Hamiltonian simulation", Phys. Rev. Research 6, 033309 (2024).
- N. Robertson, et al. "Tensor Network enhanced Dynamic Multiproduct Formulas", arXiv:2407.17405v2 [quant-ph].